After doing a test skin of the hand I realised the LRA of my finger joints were incorrectly aligned, the placement of the joints wasn’t great and there were rotations in the joints in the arm. Fixing these problems basicly meant deleting the arms IKsolver, zeroing out the joints rotations, fixing the positoning of the joints, then realiging the LRA for each joint. As painful as this was I do have a much neater arm as a result. I also found a way of positioning the locator for the elbow perfectly so when the pole vector constraint is used for the arms IKsolver there is no 'pop’, the arm stays exactly in place.
After all that we should now have created a controll shape to manipulate the directon of the elbow, without modifying the position of the arm in the proccess.
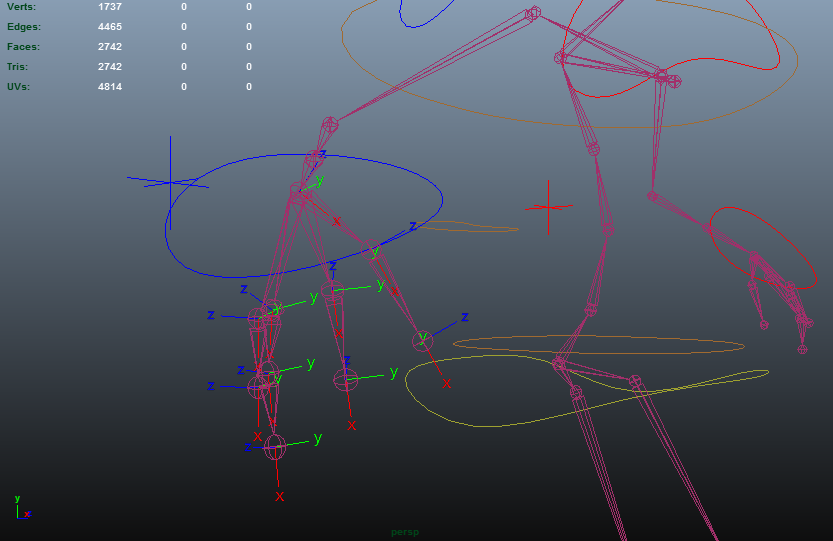
In the screenshot you can see the hand with fixed LRA. Each finger can be curled and extended by only manipulating one axis.